|
||||
|
|
Системы зенитного ракетного оружия Классификация и боевые свойства зенитных ракетных комплексов Зенитное ракетное оружие относится к ракетному оружию класса «земля-воздух» и предназначено для уничтожения средств воздушного нападения противника зенитными управляемыми ракетами (ЗУР). Оно представлено различными системами. Система зенитного ракетного оружия (зенитная ракетная система) - совокупность зенитного ракетного комплекса (ЗРК) и средств, обеспечивающих его применение. Зенитный ракетный комплекс - совокупность функционально связанных боевых и технических средств, предназначенных для поражения воздушных целей зенитными управляемыми ракетами. В состав ЗРК входят средства обнаружения, опознавания и целеуказания, средства управления полетом ЗУР, одна или несколько пусковых установок (ПУ) с ЗУР, технические сред- сва и электрические источники питания. Техническую основу ЗРК составляет система управления ЗУР. В зависимости от принятой системы управления различают комплексы телеуправления ЗУР, самонаведения ЗУР, комбинированного управления ЗУР. Каждый ЗРК обладает определенными боевыми свойствами, особенностями, совокупность которых может служить классификационными признаками, позволяющими отнести его к определенному типу. К боевым свойствам ЗРК относятся всепогодность, помехозащищенность, мобильность, универсальность, надежность, степень автоматизации процессов ведения боевой работы и др. Всепогодностъ - способность ЗРК уничтожать воздушные цели в любых погодных условиях. Различают ЗРК всепогодные и невсепогодные. Последние обеспечивают уничтожение целей при определенных погодных условиях и времени суток. Помехозащищенность - свойство, позволяющее ЗРК уничтожать воздушные цели в условиях помех, создаваемых противником для подавления электронных (оптических) средств. Мобильность - свойство, проявляющееся в транспортабельности и времени перехода из походного положения в боевое и из боевого в походное. Относительным показателем мобильности может служить суммарное время, необходимое для смены стартовой позиции в заданных условиях. Составной частью мобильности является маневренность. Наиболее мобильным считается комплекс, обладающий большей транспортабельностью и требующий меньшего времени на совершение маневра. Мобильные комплексы могут быть самоходными, буксируемыми и переносными. Немобильные ЗРК называют стационарными. Универсальность - свойство, характеризующее технические возможности ЗРК уничтожать воздушные цели в большом диапазоне дальностей и высот. Надежность - способность нормально функционировать в заданных условиях эксплуатации. По степени автоматизации различают зенитные ракетные комплексы автоматические, полуавтоматические и неавтоматические. В автоматических ЗРК все операции по обнаружению, сопровождению целей и наведению ракет выполняются автоматами без участия человека. В полуавтоматических и неавтоматических ЗРК в решении ряда задач принимает участие человек. Зенитные ракетные комплексы различают по числу целевых и ракетных каналов. Комплексы, обеспечивающие одновременное сопровождение и обстрел одной цели, называются одноканальными, а нескольких целей - многоканальными. По дальности стрельбы комплексы подразделяются на ЗРК дальнего действия (ДД) с дальностью стрельбы более 100 км, средней дальности (СД) с дальностью стрельбы от 20 до 100 км, малой дальности (МД) с дальностью стрельбы от 10 до 20 км и ближнего действия (БД) с дальностью стрельбы до 10 км. Тактико-технические характеристики зенитного ракетного комплекса Тактико-технические характеристики (ТТХ) определяют боевые возможности ЗРК. К ним относятся: назначение ЗРК; дальности и высоты поражения воздушных целей; возможности уничтожения целей, летящих с различными скоростями; вероятности поражения воздушных целей при отсутствии и наличии помех, при стрельбе по маневрирующим целям; число целевых и ракетных каналов; помехозащищенность ЗРК; работное время ЗРК (время реакции); время перевода ЗРК из походного положения в боевое и наоборот (время развертывания и свертывания ЗРК на стартовой позиции); скорость передвижения; боекомплект ракет; запас хода; массовые и габаритные характеристики и др. ТТХ задаются в тактико-техническом задании на создание нового образца ЗРК и уточняются в процессе полигонных испытаний. Значения показателей ТТХ обусловлены конструктивными особенностями элементов ЗРК принципами их работы. Назначение ЗРК - обобщенная характеристика, указывающая на боевые задачи, решаемые посредством данного типа ЗРК. Дальность поражения (стрельбы) - дальность, на которой цели поражаются с вероятностью не ниже заданной. Различают минимальную и максимальную дальности. Высота поражения (стрельбы) - высота, на которой цели поражаются с вероятностью не ниже заданной. Различают минимальную и максимальную высоты. Возможность уничтожения целей, летящих с различными скоростями, - характеристика, указывающая на предельно допустимое значение скоростей полета целей, уничтожаемых в заданных диапазонах дальностей и высоты их полета. Величина скорости полета цели обуславливает значения необходимых перегрузок ракеты, динамических ошибок наведения и вероятность поражения цели одной ракетой. При больших скоростях цели возрастают необходимые перегрузки ракеты, динамические ошибки наведения, уменьшается вероятность поражения. В результате уменьшаются значения максимальной дальности и высоты уничтожения целей. Вероятность поражения цели - численная величина, характеризующая возможность поражения цели при заданных условиях стрельбы. Выражается числом от 0 до 1. Цель может быть поражена при стрельбе одной или несколькими ракетами, поэтому рассматривают соответствующие вероятности поражения Р; и Рп . Целевой канал - совокупность элементов ЗРК, обеспечивающая одновременное сопровождение и обстрел одной цели. Различают ЗРК одно- и многоканальные по цели. N-канальный по цели комплекс позволяет одновременно обстреливать N целей. В состав целевого канала входят визир и устройство определения координат цели. Ракетный канал - совокупность элементов ЗРК, обеспечивающая одновременно подготовку к старту, старт и наведение одной ЗУР на цель. В состав ракетного канала входят: пусковое устройство (пусковая установка), устройство подготовки к старту и старта ЗУР, визир и устройство определения координат ракеты, элементы устройства формирования и передачи команд управления ракетой. Составной частью ракетного канала является ЗУР. ЗРК, состоящие на вооружении, являются одно- и многоканальными. Одноканальными выполняются переносные комплексы. Они позволяют одновременно наводить на цель только одну ракету. Многоканальные по ракете ЗРК обеспечивают одновременный обстрел одной или нескольких целей несколькими ракетами. Такие ЗРК имеют большие возможности по последовательному обстрелу целей. Для получения заданного значения вероятности уничтожения цели ЗРК имеет 2-3 ракетных канала на один целевой канал. В качестве показателя помехозащищенности используются: коэффициент помехозащищенности, допустимая плотность мощности помехи на дальней (ближней) границе зоны поражения в районе постановщика помехи, при которой обеспечивается своевременное обнаружение (вскрытие) и уничтожение (поражение) цели, дальность открытой зоны, дальность, начиная с которой цель обнаруживается (вскрывается) на фоне помех при постановке постановщиком помехи. Работное время ЗРК (время реакции) - интервал времени между моментом обнаружения воздушной цели средствами ЗРК и пуском первой ракеты. Оно определяется временем, которое затрачивается на поиск и захват цели и на подготовку исходных данных для стрельбы. Работное время ЗРК зависит от конструктивных особенностей и характеристик ЗРК от уровня подготовки боевого расчета. Для современных ЗРК его величина находится в пределах от единиц до десятков секунд. Время перевода ЗРК из походного положения в боевое - время с момента подачи команды на перевод комплекса в боевое положение до готовности комплекса к открытию огня. Для ПЗРК это время минимальное и составляет несколько секунд. Время перевода ЗРК в боевое положение определяется исходным состоянием его элементов, режимом перевода и видом источника электропитания. Время перевода ЗРК из боевого положения в походное - время с момента подачи команды на перевод ЗРК в походное положение до окончания построения элементов ЗРК в походную колонну. Боевой комплект (бк) - количество ракет, установленных на один ЗРК. Запас хода - предельное расстояние, которое может пройти автотранспортное средство ЗРК, израсходовав полную заправку топлива. Массовые характеристики - предельные массовые характеристики элементов (кабин) ЗРК и ЗУР. Габаритные характеристики - предельные внешние очертания элементов (кабин) ЗРК и ЗУР, определяемые наибольшей шириной, длиной и высотой. Зона поражения ЗРК Зона поражения комплекса - область пространства, в пределах которой обеспечивается поражение воздушной цели зенитной управляемой ракетой в расчетных условиях стрельбы с заданной вероятностью. С учетом эффективности стрельбы она определяет досягаемость комплекса по высоте, дальности и курсовому параметру. Расчетные условия стрельбы - условия, при которых углы закрытия позиции ЗРК равны нулю, характеристики и параметры движения цели (ее эффективная отражающая поверхность, скорость и др.) не выходят за заданные пределы, атмосферные условия не мешают наблюдению за целью. Реализуемая зона поражения - часть зоны поражения, в которой обеспечивается поражение цели определенного типа в конкретных условиях стрельбы с заданной вероятностью. Зона обстрела - пространство вокруг ЗРК, в котором обеспечивается наведение ракеты на цель. 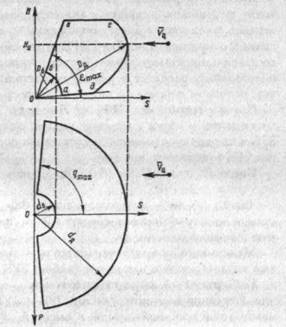 Рис. 1. Зона поражения ЗРК: вертикальное (а) и горизонтальное (б) сечение Зона поражения изображается в параметрической системе координат и характеризуется положением дальней, ближней, верхней и нижней границ. Основные ее характеристики: горизонтальная (наклонная) дальность до дальней и ближней границ d d (D d ) и d(D), минимальная и максимальная высоты H mn и Н max , предельный курсовой угол q max и максимальный угол места s max . Горизонтальная дальность до дальней границы зоны поражения и предельный курсовой угол определяют предельный параметр зоны поражения Р пред т. е. максимальный параметр цели, при котором обеспечивается ее поражение с вероятностью не ниже заданной. Для многоканальных по цели ЗРК характерной величиной также является параметр зоны поражения Р стро , до которого количество проводимых стрельб по цели не менее, чем при нулевом параметре ее движения. Типичное сечение зоны поражения вертикальной биссекторной и горизонтальной плоскостями показано на рисунке. Положение границ зоны поражения определяется большим количеством факторов, связанных с техническими характеристиками отдельных элементов ЗРК и контура управления в целом, условиями стрельбы, характеристиками и параметрами движения воздушной цели. Положение дальней границы зоны поражения определяет потребную дальность действия СНР. Положение реализуемой дальней и нижней границ зоны поражения ЗРК может также зависеть и от рельефа местности. Зона пуска ЗУР Чтобы встреча ракеты с целью произошла в зоне поражения, пуск ракеты необходимо производить заблаговременно с учетом подлетного времени ракеты и цели до точки встречи. Зона пуска ракет - область пространства, при нахождении цели в которой в момент пуска ракет обеспечивается их встреча в зоне поражения ЗРК. Для определения границ зоны пуска необходимо из каждой точки зоны поражения отложить в сторону, обратную курсу цели, отрезок, равный произведению скорости цели Vii на полетное время ракеты до данной точки. На рисунке наиболее характерные точки зоны пуска соответственно обозначены буквами а', 6' в' г' д'. 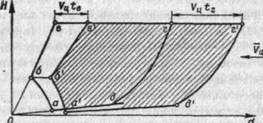 Рис. 2. Зона пуска ЗРК (вертикальное сечение) При сопровождении цели СНР текущие координаты точки встречи, как правило, вычисляются автоматически и отображаются на экранах индикаторов. Пуск ракеты производится при нахождении точки встречи в границах зоны поражения. Гарантированная зона пуска - область пространства, при нахождении цели в которой в момент пуска ракеты обеспечивается ее встреча с целью в зоне поражения независимо от вида противоракетного маневра цели. Состав и характеристики элементов зенитных ракетных комплексов В соответствии с решаемыми задачами функционально необходимыми элементами ЗРК являются: средства обнаружения, опознавания ЛА и целеуказания; средства управления полетом ЗУР; пусковые установки и пусковые устройства; зенитные управляемые ракеты. Для борьбы с низколетящими целями могут применяться переносные зенитные ракетные комплексы (ПЗРК). При использовании в составе ЗРК («Пэтриот», С-300) многофункциональных РЛС они выполняют роль средств обнаружения, опознавания, устройств сопровождения ЛА и наводимых на них ракет, устройств передачи команд управления, а также станций подсвета цели для обеспечения работы бортовых радиопеленгаторов. Средства обнаружения В зенитных ракетных комплексах в качестве средств обнаружения ЛА могут использоваться радиолокационные станции, оптические и пассивные пеленгаторы. Оптические средства обнаружения (ОСО). В зависимости от места расположения источника излучения лучистой энергии оптические средства обнаружения подразделяются на пассивные и полуактивные. В пассивных ОСО, как правило, используется лучистая энергия, обусловленная нагревом обшивки ЛА и работающими двигателями, либо световая энергия Солнца, отраженная от ЛА. В полуактивных ОСО на наземном пункте управления располагается оптический квантовый генератор (лазер), энергия которого используется для зондирования пространства. Пассивное ОСО представляет собой телевизионно-оптический визир, в состав которого входят передающая телевизионная камера (ПТК), синхронизатор, каналы связи, видеоконтрольное устройство (ВКУ). Телевизионно-оптический визир преобразует поток световой (лучистой) энергии, идущей от ЛА, в электрические сигналы, которые передаются по кабельной линии связи и используются в ВКУ для воспроизведения переданного изображения ЛА, находящегося в поле зрения объектива ПТК. В передающей телевизионной трубке оптическое изображение преобразуется в электрическое, при этом на фотомозаике (мишени) трубки возникает потенциальный рельеф, отображающий в электрической форме распределение яркости всех точек ЛА. Считывание потенциального рельефа происходит электронным лучом передающей трубки, который под действием поля отклоняющих катушек движется синхронно с электронным лучом ВКУ. На сопротивлении нагрузки передающей трубки возникает видеосигнал изображения, который усиливается предварительным усилителем и по каналу связи поступает на ВКУ. Видеосигнал после усиления в усилителе подается на управляющий электрод приемной трубки (кинескопа). Синхронизация движения электронных лучей ПТК и ВКУ осуществляется импульсами строчной и кадровой разверток, которые не смешиваются с сигналом изображения, а передаются по отдельному каналу. Оператор наблюдает на экране кинескопа изображения ЛА, находящихся в поле зрения объектива визира, а также визирные метки, соответствующие положению оптической оси ТОВ по азимуту (b) и углу места (e), в результате чего могут быть определены азимут и угол места ЛА. Полуактивные ОСО (лазерные визиры) по своей структуре, принципам построения и выполняемым функциям почти полностью аналогичны радиолокационным. Они позволяют определять угловые координаты, дальность и скорость цели. В качестве источника сигнала используется лазерный передатчик, запуск которого осуществляется импульсом синхронизатора. Световой сигнал лазера излучается в пространство, отражается от ЛА и принимается телескопом. 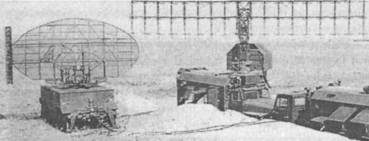 Радиолокационные средства обнаружения Радиолокационные средства обнаружения Узкополосный фильтр, стоящий на пути отраженного импульса, уменьшает воздействие посторонних источников света на работу визира. Отраженные от ЛА световые импульсы попадают на светочувствительный приемник, преобразуются в сигналы видеочастоты и используются в блоках измерения угловых координат и дальности, а также для отображения на экране индикатора. В блоке измерения угловых координат вырабатываются сигналы управления приводами оптической системы, которые обеспечивают как обзор пространства, так и автоматическое сопровождение ЛА по угловым координатам (непрерывное совмещение оси оптической системы с направлением на ЛА). Средства опознавания ЛА Средства опознавания позволяют определить государственную принадлежность обнаруженного ЛА и отнести его к категории «свой-чужой». Они могут быть совмещенными и автономными. В совмещенных устройствах сигналы запроса и ответа излучаются и принимаются устройствами РЛС.   Антенна РЛС обнаружения «Top-M1» Оптические средства обнаружения 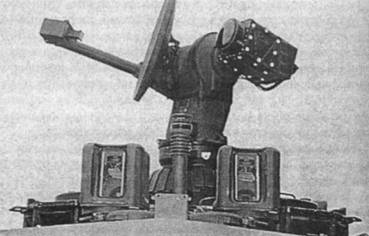 Радиолокационно-оптические средства обнаружения На «своем» ЛА устанавливается приемник запросных сигналов, принимающий закодированные сигналы запроса, посылаемые РЛС обнаружения (опознавания). Приемник декодирует запросный сигнал и при соответствии этого сигнала установленному коду выдает его в передатчик сигналов ответа, установленный на борту «своего» ЛА. Передатчик вырабатывает закодированный сигнал и посылает его в направлении РЛС, где он принимается, декодируется и после преобразования выдается на индикатор в виде условной метки, которая высвечивается рядом с отметкой от «своего» ЛА. ЛА противника на запросный сигнал РЛС не отвечает. Средства целеуказания Средства целеуказания предназначены для приема, обработки и анализа информации о воздушной обстановке и определения последовательности обстрела обнаруженных целей, а также передачи данных о них на другие боевые средства. Информация об обнаруженных и опознанных ЛА, как правило, поступает от РЛС. В зависимости от вида оконечного устройства средств целеуказания анализ информации о ЛА осуществляется автоматически (при использовании ЭВМ) или вручную (оператором при использовании экранов электронно-лучевых трубок). Результаты решения ЭВМ (счетно-решающего прибора) могут отображаться на специальных пультах, индикаторах или в виде сигналов для принятия оператором решения об их дальнейшем использовании либо передаваться на другие боевые средства ЗРК автоматически. Если в качестве оконечных устройств используется экран, то отметки от обнаруженных ЛА отображаются световыми знаками. Данные целеуказания (решения на обстрел целей) могут передаваться как по кабельным линиям, так и по радиолиниям связи. Средства целеуказания и обнаружения могут обслуживать как одно, так и несколько подразделений ЗРВ. Средства управления полетом ЗУР При обнаружении и опознавании ЛА анализ воздушной обстановки, а также порядок обстрела целей осуществляет оператор. При этом в работе средств управления полетом ЗУР участвуют устройства измерения дальности, угловых координат, скорости, формирования команд управления и передачи команд (командная радиолиния управления), автопилот и рулевой тракт ракеты. Устройство измерения дальности предназначено для измерения наклонной дальности до ЛА и ЗУР. Определение дальности основано на прямолинейности распространения электромагнитных волн и постоянстве их скорости. Дальность может быть измерена локационными и оптическими средствами. Для этого используется время прохождения сигнала от источника излучения до ЛА и обратно. Время может быть измерено по запаздыванию отраженного от ЛА импульса, величиной изменения частоты передатчика, величиной изменения фазы радиолокационного сигнала. Информация о дальности до цели используется для определения момента пуска ЗУР, а также для выработки команд управления (для систем с телеуправлением). Устройство измерения угловых координат предназначено для измерения угла места (е ) и азимута (b ) ЛА и ЗУР. В основу измерения положено свойство прямолинейного распространения электромагнитных волн. Устройство измерения скорости предназначено для измерения радиальной скорости движения ЛА. В основу измерения положен эффект Доплера, заключающийся в изменении частоты отраженного сигнала от движущихся объектов. Устройство формирования команд (УФК) управления предназначено для выработки электрических сигналов, величина и знак которых соответствуют величине и знаку отклонения ракеты от кинематической траектории. Величина и направление отклонения ЗУР от кинематической траектории проявляются в нарушении связей, обуславливаемых характером движения цели и методом наведения на нее ЗУР. Меру нарушения этой связи называют параметром рассогласования A(t). Величина параметра рассогласования измеряется средствами сопровождения ЗРК, которые на основании A(t) формируют соответствующий электрический сигнал в виде напряжения или тока, называемый сигналом рассогласования. Сигнал рассогласования является основной составляющей при формировании команды управления. Для повышения точности наведения ракеты на цель в состав команды управления вводятся некоторые сигналы коррекции. В системах телеуправления при реализации метода трех точек для сокращения времени вывода ракеты в точку встречи с целью, а также уменьшения ошибок наведения ракеты на цель в состав команды управления могут вводиться сигнал демпфирования и сигнал компенсации динамических ошибок, обусловленных движением цели, массой (весом) ракеты. Устройство передачи команд управления (командные радиолинии управления). В системах телеуправления передача команд управления с пункта наведения на бортовое устройство ЗУР осуществляется посредством аппаратуры, образующей командную радиолинию управления. Эта линия обеспечивает передачу команд управления полетом ракеты, разовых команд, изменяющих режим работы бортовой аппаратуры. Командная радиолиния представляет собой многоканальную линию связи, число каналов которой соответствует числу передаваемых команд при одновременном управлении несколькими ракетами. Автопилот предназначен для стабилизации угловых движений ракеты относительно центра масс. Кроме того, автопилот является составной частью системы управления полетом ракеты и управляет положением самого центра масс в пространстве в соответствии с командами управления. Пусковые установки, пусковые устройства Пусковые установки (ПУ) и пусковые устройства - специальные устройства, предназначенные для размещения, прицеливания, предстартовой подготовки и пуска ракеты. ПУ состоит из пускового стола или направляющих, механизмов наводки, средств горизонтирования, проверочно-пусковой аппаратуры, источников электропитания. Пусковые установки различают по виду старта ракет - с вертикальным и наклонным стартом, по подвижности - стационарные, полустационарные (разборные), подвижные.  Стационарная пусковая установка C-25 с вертикальный стартом  Переносной зенитный ракетный комплекс «Игла»  Пусковая установка переносного зенитного ракетного комплекса «Блоупайп» с тремя направляющими Стационарные ПУ в виде пусковых столов монтируются на специальных бетонированных площадках и перемещению не подлежат. Полу стационарные ПУ при необходимости могут разбираться и после транспортировки устанавливаться на другой позиции. Подвижные ПУ размещаются на специальных транспортных средствах. Применяются в мобильных ЗРК и выполняются в самоходном, буксируемом, носимом (переносном) вариантах. Самоходные ПУ размещаются на гусеничных или колесных шасси, обеспечивая быстрый переход из походного положения в боевое и обратно. Буксируемые ПУ устанавливаются на гусеничных или колесных несамоходных шасси, перевозятся тягачами. Переносные пусковые устройства выполняются в виде пусковых труб, в которые устанавливается ракета перед пуском. Пусковая труба может иметь прицельное устройство для предварительного нацеливания и пусковой механизм. По количеству ракет, находящихся на пусковой установке, различают одинарные ПУ, спаренные и т. д. Зенитные управляемые ракеты Зенитные управляемые ракеты классифицируются по количеству ступеней, аэродинамической схеме, способу наведения, типу боевого заряда. Большинство ЗУР могут быть одно- и двухступенчатыми. По аэродинамической схеме различают ЗУР, выполненные по нормальной схеме, по схеме «поворотное крыло», а также по схеме «утка». По способу наведения различают самонаводящиеся и телеуправляемые ЗУР. Самонаводящейся называется ракета, на борту которой установлена аппаратура управления ее полетом. Телеуправляемыми называют ЗУР, управляемые (наводимые) наземными средствами управления (наведения). По типу боевого заряда различают ЗУР с обычными и ядерными боевыми частями.  Самоходная ПУ ЗРК «Бук» с наклонный стартом  Полустационарная ПУ ЗРК С-75 с наклонным стартом  Самоходная ПУ ЗРК С-300ПМУ с вертикальным стартом Переносные зенитные ракетные комплексы ПЗРК предназначены для борьбы с низколетящими целями. В основу построения ПЗРК может быть положена пассивная система самонаведения («Стингер», «Стрела-2, 3», «Игла»), радиокомандная система («Блоупайп»), система наведения по лазерному лучу (RBS-70). ПЗРК с пассивной системой самонаведения включают в себя пусковую установку (пусковой контейнер), пусковой механизм, аппаратуру опознавания, зенитную управляемую ракету. Пусковая установка представляет собой герметичную трубу из стеклопластика, в которой хранится ЗУР. Труба герметична. Снаружи трубы располагаются прицельные приспособления для подготовки пуска ракеты и пусковой механизм. Пусковой механизм («Стингер») включает в себя электрическую батарею питания аппаратуры как самого механизма, так и головки самонаведения (до пуска ракеты), баллон с хладагентом для охлаждения приемника теплового излучения ГСН во время подготовки ракеты к пуску, коммутирующее устройство, обеспечивающее необходимую последовательность прохождения команд и сигналов, индикаторное устройство. Аппаратура опознавания включает в себя антенну опознавания и электронный блок, в состав которого входят приемопередающее устройство, логические схемы, вычислительное устройство, источник питания. Ракета (FIM-92A) одноступенчатая, твердотопливная. Головка самонаведения может работать в ИК и ультрафиолетовом диапазонах, приемник излучения охлаждается. Совмещение оси оптической системы ГСН с направлением на цель в процессе ее сопровождения осуществляется с помощью гироскопического привода. Пуск ракеты из контейнера производится с помощью стартового ускорителя. Маршевый двигатель включается, когда ракета удалится на расстояние, при котором исключается поражение стрелка-зенитчика струей работающего двигателя. В состав радиокомандных ПЗРК входят транспорт- но-пусковой контейнер, блок наведения с аппаратурой опознавания и зенитная управляемая ракета. Сопряжение контейнера с расположенной в нем ракетой и блоком наведения осуществляется в процессе подготовки ПЗРК к боевому применению. На контейнере размещены две антенны: одна - устройства передачи команд, другая - аппаратуры опознавания. Внутри контейнера находится сама ракета. Блок наведения включает в себя монокулярный оптический прицел, обеспечивающий захват и сопровождение цели, ИК-устройство измерения отклонения ракеты от линии визирования цели, устройство выработки и передачи команд наведения, программное устройство подготовки и производства пуска, запросчик аппаратуры опознавания «свой-чужой». На корпусе блока имеется контроллер, применяемый при наведении ракеты на цель. После пуска ЗУР оператор сопровождает ее по излучению хвостового ИК-трассера с помощью оптического прицела. Вывод ракеты на линию визирования осуществляется вручную или автоматически. В автоматическом режиме отклонение ракеты от линии визирования, измеренное ИК-устройством, преобразуется в команды наведения, передаваемые на борт ЗУР. Отключение ИК-устройства производится через 1-2 с полета, после чего ракета наводится в точку встречи вручную при условии, что оператор добивается совмещения изображения цели и ракеты в поле зрения прицела, изменяя положение выключателя контроля. Команды управления передаются на борт ЗУР, обеспечивая ее полет по требуемой траектории. В комплексах, обеспечивающих наведение ЗУР по лазерному лучу (RBS-70), для наведения ракеты на цель в хвостовом отсеке ЗУР размещаются приемники лазерного излучения, которые вырабатывают сигналы, управляющие полетом ракеты. В состав блока наведения входят оптический прицел, устройство формирования лазерного луча с изменяемой в зависимости от удаления ЗУР фокусировкой. Системы управления зенитными ракетами Системы телеуправления Системами телеуправления называются такие, в которых движение ракеты определяется наземным пунктом наведения, непрерывно контролирующим параметры траектории цели и ракеты. В зависимости от места формирования команд (сигналов) управления рулями ракеты эти системы делятся на системы наведения по лучу и командные системы телеуправления. В системах наведения по лучу направление движения ракеты задается с помощью направленного излучения электромагнитных волн (радиоволн, лазерного излучения и др.). Луч модулируется таким образом, чтобы при отклонении ракеты от заданного направления ее бортовые устройства автоматически определяли сигналы рассогласования и вырабатывали соответствующие команды управления ракетой. Примером применения такой системы управления с телеориентированием ракеты в лазерном луче (после ее вывода в этот луч) является многоцелевой ракетный комплекс ADATS, разработанный швейцарской фирмой «Эрликон» совместно с американской «Мартин Мариэтта». Считается, что такой способ управления по сравнению с командной системой телеуправления первого вида обеспечивает на больших дальностях более высокую точность наведения ракеты на цель. В командных системах телеуправления команды управления полетом ракеты вырабатываются на пункте наведения и по линии связи (линии телеуправления) передаются на борт ракеты. В зависимости от способа измерения координат цели и определения ее положения относительно ракеты командные системы телеуправления делятся на системы телеуправления первого вида и системы телеуправления второго вида. В системах первого вида измерение текущих координат цели осуществляется непосредственно наземным пунктом наведения, а в системах второго вида - бортовым координатором ракеты с последующей их передачей на пункт наведения. Выработка команд управления ракетой как в первом, так и во втором случае осуществляется наземным пунктом наведения. 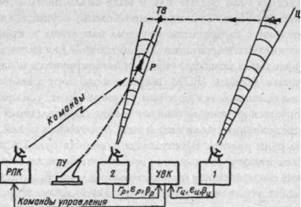 Рис. 3. Командная система телеуправления Определение текущих координат цели и ракеты (например, дальности, азимута и угла места) осуществляется радиолокационной станцией сопровождения. В некоторых комплексах эта задача решается двумя радиолокаторами, один из которых сопровождает цель (радиолокатор 7 визирования цели), а другой - ракету (радиолокатор 2 визирования ракеты). Визирование цели основано на использовании принципа активной радиолокации с пассивным ответом, т. е. на получении информации о текущих координатах цели из радиосигналов, отраженных от нее. Сопровождение цели может быть автоматическим (АС), ручным (PC) или смешанным. Чаще всего визиры цели имеют устройства, обеспечивающие различные виды сопровождения цели. Автоматическое сопровождение осуществляется без участия оператора, ручное и смешанное - с участием оператора. Для визирования ракеты в таких системах, как правило, применяются радиолокационные линии с активным ответом. На борту ракеты устанавливается приемопередатчик, излучающий ответные импульсы на импульсы запроса, посылаемые пунктом наведения. Такой способ визирования ракеты обеспечивает ее устойчивое автоматическое сопровождение, в том числе и при стрельбе на значительные дальности. Измеренные значения координат цели и ракеты подаются в устройство выработки команд (УВК), которое может выполняться на базе ЭЦВМ или в виде аналогового счетно-решающего прибора. Формирование команд осуществляется в соответствии с выбранным методом наведения и принятым параметром рассогласования. Выработанные для каждой плоскости наведения команды управления шифруются и радиопередатчиком команд (РПК) выдаются на борт ракеты. Эти команды принимаются бортовым приемником, усиливаются, дешифруются и через автопилот в виде определенных сигналов, определяющих величину и знак отклонения рулей, выдаются на рули ракеты. В результате поворота рулей и появления углов атаки и скольжения возникают боковые аэродинамические силы, которые изменяют направление полета ракеты. Процесс управления ракетой осуществляется непрерывно до ее встречи с целью. После вывода ракеты в район цели, как правило, с помощью неконтактного взрывателя решается задача выбора момента подрыва боевой части зенитной управляемой ракеты. Командная система телеуправления первого вида не требует увеличения состава и массы бортовой аппаратуры, обладает большей гибкостью по числу и геометрии возможных траекторий ракеты. Основной недостаток системы - зависимость величины линейной ошибки наведения ракеты на цель от дальности стрельбы. Если, например, величину угловой ошибки наведения принять постоянной и равной 1/1000 дальности, то промах ракеты при дальностях стрельбы 20 и 100 км соответственно составит 20 и 100 м. В последнем случае для поражения цели потребуется увеличение массы боевой части, а следовательно, и стартовой массы ракеты. Поэтому система телеуправления первого вида используется для поражения целей ЗУР на малых и средних дальностях. В системе телеуправления первого вида воздействию помех подвержены каналы сопровождения цели и ракеты и линия радиоуправления. Решение проблемы повышения помехоустойчивости данной системы иностранные специалисты связывают с использованием, в том числе и комплексно, различных по диапазону частот и принципам работы каналов визирования цели и ракеты (радиолокационных, инфракрасных, визуальных и др.), а также радиолокационных станций с фазированной антенной решеткой (ФАР). 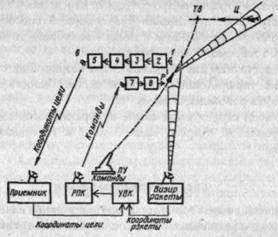 Рис. 4. Командная система телеуправления второго вида Координатор (радиопеленгатор) цели устанавливается на борту ракеты. Он осуществляет слежение за целью и определение ее текущих координат в подвижной системе координат, связанной с ракетой. Координаты цели по каналу связи передаются на пункт наведения. Следовательно, бортовой радиопеленгатор в общем случае включает антенну приема сигналов цели (7), приемник (2), устройство определения координат цели (3), шифратор (4), передатчик сигналов (5), содержащих информацию о координатах цели, и передающую антенну (6). Координаты цели принимаются наземным пунктом наведения и подаются в устройство выработки команд управления. От станции сопровождения (радиовизира) ракеты в УВК также поступают текущие координаты зенитной управляемой ракеты. Устройство выработки команд определяет параметр рассогласования и формирует команды управления, которые после соответствующих преобразований станцией передачи команд выдаются на борт ракеты. Для приема этих команд, их преобразования и отработки ракетой на ее борту устанавливается такая же аппаратура, как и в системах телеуправления первого вида (7 - приемник команд, 8 - автопилот). Достоинства системы телеуправления второго вида заключаются в независимости точности наведения ЗУР от дальности стрельбы, повышении разрешающей способности по мере приближения ракеты к цели и возможности наведения на цель требуемого числа ракет. К недостаткам системы относятся возрастание стоимости зенитной управляемой ракеты и невозможность режимов ручного сопровождения цели. По своей структурной схеме и характеристикам система телеуправления второго вида близка к системам самонаведения. Системы самонаведения Самонаведением называется автоматическое наведение ракеты на цель, основанное на использовании энергии, идущей от цели к ракете. Головка самонаведения ракеты автономно осуществляет сопровождение цели, определяет параметр рассогласования и формирует команды управления ракетой. По виду энергии, которую излучает или отражает цель, системы самонаведения разделяются на радиолокационные и оптические (инфракрасные или тепловые, световые, лазерные и др.). В зависимости от места расположения первичного источника энергии системы самонаведения могут быть пассивными, активными и полуактивными. При пассивном самонаведении энергия, излучаемая или отражаемая целью, создается источниками самой цели или естественным облучателем цели (Солнцем, Луной). Следовательно, информация о координатах и параметрах движения цели может быть получена без специального облучения цели энергией какого-либо вида. Система активного самонаведения характеризуется тем, что источник энергии, облучающий цель, устанавливается на ракете и для самонаведения ЗУР используется отраженная от цели энергия этого источника. При полуактивном самонаведении цель облучается первичным источником энергии, расположенным вне цели и ракеты (ЗРК «Хок»). Радиолокационные системы самонаведения получили широкое распространение в ЗРК из-за их практической независимости действия от метеорологических условий и возможности наведения ракеты на цель любого типа и на различные дальности. Они могут использоваться на всем или только на конечном участке траектории зенитной управляемой ракеты, т. е. в сочетании с другими системами управления (системой телеуправления, программного управления). В радиолокационных системах применение пассивного способа самонаведения весьма ограничено. Такой способ возможен лишь в частных случаях, например при самонаведении ЗУР на самолет, имеющий на своем борту непрерывно работающий радиопередатчик помех. Поэтому в радиолокационных системах самонаведения применяют специальное облучение («подсвечивание») цели. При самонаведении ракеты на всем участке ее траектории полета к цели, как правило, по энергетическим и стоимостным соотношениям применяются полуактивные системы самонаведения. Первичный источник энергии (радиолокатор подсвета цели) обычно располагается на пункте наведения. В комбинированных системах применяются как полуактивная, так и активная системы самонаведения. Ограничение по дальности активной системы самонаведения происходит за счет максимальной мощности, которую можно получить на ракете с учетом возможных габаритов и массы бортовой аппаратуры, в том числе и антенны головки самонаведения. Если самонаведение начинается не с момента старта ракеты, то с увеличением дальности стрельбы ракетой энергетические преимущества активного самонаведения по сравнению с полуактивным возрастают. Для вычисления параметра рассогласования и выработки команд управления следящие системы головки самонаведения должны непрерывно отслеживать цель. При этом формирование команды управления возможно при сопровождении цели только по угловым координатам. Однако такое сопровождение не обеспечивает селекцию цели по дальности и скорости, а также защиту приемника головки самонаведения от побочной информации и помех. Для автоматического сопровождения цели по угловым координатам используются равносигнальные методы пеленгации. Угол прихода отраженной от цели волны определяется сравнением сигналов, принятых по двум или более несовпадающим диаграммам направленности. Сравнение может осуществляться одновременно или последовательно. Наибольшее распространение получили пеленгаторы с мгновенным равносигнальным направлением, в которых используется суммарно-разностный способ определения угла отклонения цели. Появление таких пеленгационных устройств обусловлено в первую очередь необходимостью повышения точности систем автоматического сопровождения цели по направлению. Такие пеленгаторы теоретически не чувствительны к амплитудным флюктуациям отраженного от цели сигнала. В пеленгаторах с равносигнальным направлением, создаваемым путем периодического изменения диаграммы направленности антенны, и, в частности, со сканирующим лучом, случайное изменение амплитуд отраженного от цели сигнала воспринимается как случайное изменение углового положения цели. Принцип селекции цели по дальности и скорости зависит от характера излучения, которое может быть импульсным или непрерывным. При импульсном излучении селекция цели осуществляется, как правило, по дальности с помощью стробирующих импульсов, открывающих приемник головки самонаведения в момент прихода сигналов от цели.  Рис. 5. Радиолокационная полуактивная система самонаведения При непрерывном излучении сравнительно просто осуществить селекцию цели по скорости. Для сопровождения цели по скорости используется эффект Доплера. Величина доплеровского смещения частоты сигнала, отраженного от цели, пропорциональна при активном самонаведении относительной скорости сближения ракеты с целью, а при полуактивном самонаведении - радиальной составляющей скорости цели относительно наземного радиолокатора облучения и относительной скорости сближения ракеты с целью. Для выделения доплеровского смещения при полуактивном самонаведении на ракете после захвата цели необходимо произвести сравнение сигналов, принятых радиолокатором облучения и головкой самонаведения. Настроенные фильтры приемника головки самонаведения пропускают в канал изменения угла только те сигналы, которые отразились от цели, движущейся с определенной скоростью относительно ракеты. Применительно к зенитному ракетному комплексу типа «Хок» она включает радиолокатор облучения (подсвета) цели, полуактивную головку самонаведения, зенитную управляемую ракету и др. Задачей радиолокатора облучения (подсвета) цели является непрерывное облучение цели электромагнитной энергией. В радиолокационной станции используется направленное излучение электромагнитной энергии, что требует непрерывного сопровождения цели по угловым координатам. Для решения других задач обеспечивается также сопровождение цели по дальности и скорости. Таким образом, наземная часть системы полуактивного самонаведения представляет собой радиолокационную станцию с непрерывным автоматическим сопровождением цели. Полуактивная головка самонаведения устанавливается на ракете и включает координатор и счетно-решающий прибор. Она обеспечивает захват и сопровождение цели по угловым координатам, дальности или скорости (или по всем четырем координатам), определение параметра рассогласования и выработку команд управления. На борту зенитной управляемой ракеты устанавливается автопилот, решающий те же задачи, что и в командных системах телеуправления. В состав зенитного ракетного комплекса, использующего систему самонаведения или комбинированную систему управления, входят также оборудование и аппаратура, обеспечивающие подготовку и пуск ракет, наведение радиолокатора облучения на цель и т. п. Инфракрасные (тепловые) системы самонаведения зенитных ракет используют диапазон волн, как правило, от 1 до 5 мкм. В этом диапазоне находится максимум теплового излучения большинства воздушных целей. Возможность применения пассивного способа самонаведения - основное преимущество инфракрасных систем. Система делается более простой, а ее действие - скрытым от противника. До пуска ЗУР воздушному противнику труднее обнаружить такую систему, а после пуска ракеты создать ей активную помеху. Приемник инфракрасной системы конструктивно может быть выполнен намного проще приемника радиолокационной ГСН. Недостаток системы - зависимость дальности действия от метеорологических условий. Тепловые лучи сильно затухают при дожде, в тумане, в облаках. Дальность действия такой системы также зависит от ориентации цели относительно приемника энергии (от направления приема). Лучистый поток из сопла реактивного двигателя самолета значительно превышает лучистый поток его фюзеляжа. Тепловые головки самонаведения получили широкое распространение в зенитных ракетах ближнего боя и малой дальности. Световые системы самонаведения основаны на том, что большинство воздушных целей отражает солнечный или лунный свет значительно сильнее, чем окружающий их фон. Это позволяет выделить цель на данном фоне и навести на нее зенитную ракету с помощью ГСН, осуществляющей прием сигнала в диапазоне видимой части спектра электромагнитных волн. Достоинства данной системы определяются возможностью применения пассивного способа самонаведения. Ее существенный недостаток - сильная зависимость дальности действия от метеорологических условий. При хороших метеорологических условиях световое самонаведение невозможно также в направлениях, где в поле зрения угломера системы попадает свет Солнца и Луны. Комбинированное управление Под комбинированным управлением понимается сочетание различных систем управления при наведении ракеты на цель. В зенитных ракетных комплексах оно применяется при стрельбе на большие дальности для получения требуемой точности наведения ракеты на цель при допустимых массовых значениях ЗУР. Возможны такие последовательные комбинации систем управления: телеуправление первого вида и самонаведение, телеуправление первого и второго вида, автономная система и самонаведение. Применение комбинированного управления обуславливает необходимость решения таких задач, как сопряжение траекторий при переходе с одного способа управления на другой, обеспечение захвата цели головкой самонаведения ракеты в полете, использование одних и тех же устройств бортовой аппаратуры на различных этапах управления и др. В момент перехода на самонаведение (телеуправление второго вида) цель должна находиться в пределах диаграммы направленности приемной антенны ГСН, ширина которой обычно не превосходит 5-10°. Кроме того, должно быть осуществлено наведение следящих систем: ГСН по дальности, по скорости или по дальности и скорости, если предусмотрена селекция цели по данным координатам для повышения разрешающей способности и помехозащищенности системы управления. Наведение ГСН на цель может производиться следующими способами: по командам, передаваемым на борт ракеты с пункта наведения; включением автономного автоматического поиска цели ГСН по угловым координатам, дальности и частоте; сочетанием предварительного командного наведения ГСН на цель с последующим поиском цели. Каждый из первых двух способов имеет свои преимущества и существенные недостатки. Задача обеспечения надежного наведения ГСН на цель в процессе полета ракеты к цели является достаточно сложной и может потребовать применения третьего способа. Предварительное наведение ГСН позволяет сузить диапазон поиска цели. При комбинации систем телеуправления первого и второго вида после начала функционирования бортового радиопеленгатора в устройство выработки команд наземного пункта наведения может поступать информация одновременно от двух источников: станции слежения за целью и ракетой и бортового радиопеленгатора. На основе сравнения сформированных команд по данным каждого источника представляется возможным решить задачу сопряжения траекторий, а также повысить точность наведения ракеты на цель (снизить случайные составляющие ошибок путем выбора источника, взвешиванием дисперсий сформированных команд). Такой способ комбинации систем управления получил название бинарного управления. Комбинированное управление применяется в случаях, когда требуемые характеристики ЗРК не могут быть достигнуты применением только одной системы управления. Автономные системы управления Автономными системами управления называются такие, в которых сигналы управления полетом вырабатываются на борту ракеты в соответствии с предварительно (до старта) заданной программой. При полете ракеты автономная система управления не получает какой-либо информации от цели и пункта управления. Такая система в ряде случаев используется на начальном участке траектории полета ракеты для вывода ее в заданную область пространства. Элементы систем управления ракетами Управляемая ракета - беспилотный ЛА с реактивным двигателем, предназначенный для поражения воздушных целей. Все бортовые устройства размещены на планере ракеты. Планер - несущая конструкция ракеты, которая состоит из корпуса, неподвижных и подвижных аэродинамических поверхностей. Корпус планера обычно цилиндрической формы с конической (сферической, оживальной) головной частью. Аэродинамические поверхности планера служат для создания подъемной и управляющих сил. К ним относятся крылья, стабилизаторы (неподвижные поверхности), рули. По взаимному расположению рулей и неподвижных аэродинамических поверхностей различают следующие аэродинамические схемы ракет: нормальная, «бесхвостка», «утка», «поворотное крыло». 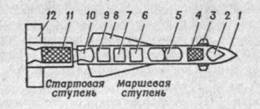 Рис. б. Схема компоновки гипотетической управляемом ракеты: 1 - корпус ракеты; 2 - неконтактный взрыватель; 3 - рули; 4 - боевая часть; 5 - баки для компонентов топлива; б - автопилот; 7 - аппаратура управления; 8 - крылья; 9 - источники бортового электропитания; 10 - ракетный двигатель маршевой ступени; 11 - ракетный двигатель стартовой ступени; 12 - стабилизаторы. 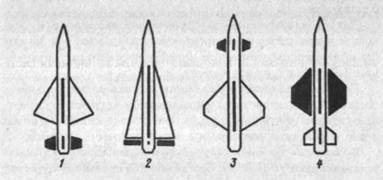 Рис. 7. Аэродинамические схемы управляемых ракет: 1 - нормальная; 2 - «бесхвостка»; 3 - «утка»; 4 - «поворотное крыло». Двигатели управляемых ракет делятся на две группы: ракетные и воздушно-реактивные. Ракетным называется двигатель, который использует топливо, полностью находящееся на борту ракеты. Для его работы не требуется забора кислорода из окружающей среды. По виду топлива ракетные двигатели разделяются на ракетные двигатели твердого топлива (РДТТ) и жидкостные ракетные двигатели (ЖРД). В качестве топлива в РДТТ используются ракетный порох и смесевое твердое топливо, которые заливаются и прессуются непосредственно в камеру сгорания двигателя. Воздушно-реактивные двигатели (ВРД) - двигатели, в которых окислителем служит кислород, забираемый из окружающего воздуха. В результате на борту ракеты содержится только горючее, что позволяет увеличить запас топлива. Недостаток ВРД - невозможность их работы в разреженных слоях атмосферы. Они могут применяться на ЛА при высотах полета до 35-40 км. Автопилот (АП) предназначен для стабилизации угловых движений ракеты относительно центра масс. Кроме того, АП является составной частью системы управления полетом ракеты и управляет положением самого центра масс в пространстве в соответствии с командами управления. В первом случае автопилот выполняет роль системы стабилизации ракеты, во втором - роль элемента системы управления. Для стабилизации ракеты в продольной, азимутальной плоскостях и при движении относительно продольной оси ракеты (по крену) используются три независимых канала стабилизации: по тангажу, курсу и крену. Бортовая аппаратура управления полетом ракеты является составной частью системы управления. Ее устройство определяется принятой системой управления, реализованной в комплексе управления зенитными и авиационными ракетами. В системах командного телеуправления на борту ракеты устанавливают устройства, составляющие приемный тракт командной радиолинии управления (КРУ). В их состав входят антенна и приемник радиосигналов команд управления, селектор команд, демодулятор. Боевое снаряжение зенитных и авиационных ракет - сочетание боевой части и взрывателя. Боевая часть имеет боевой заряд, детонатор и корпус. По принципу действия боевые части могут быть осколочными и осколочно-фугасными. Некоторые типы ЗУР могут оснащаться и ядерными боевыми частями (например, в ЗРК «Найк-Геркулес»). Поражающими элементами боевой части являются как осколки, так и готовые элементы, размещенные на поверхности корпуса. В качестве боевых зарядов применяют бризантные (дробящие) взрывчатые вещества (тротил, смеси тротила с гексогеном и др.). Взрыватели ракет могут быть неконтактными и контактными. Неконтактные взрыватели в зависимости от места положения источника энергии, используемой для срабатывания взрывателя, подразделяются на активные, полуактивные и пассивные. Кроме того, неконтактные взрыватели подразделяются на электростатические, оптические, акустические, радиовзрыватели. В зарубежных образцах ракет чаще применяются радио- и оптические взрыватели. В отдельных случаях одновременно работают оптический и радиовзрыватель, что повышает надежность подрыва боевой части в условиях электронного подавления. В основу работы радиовзрывателя положены принципы радиолокации. Поэтому такой взрыватель представляет собой миниатюрный радиолокатор, формирующий сигнал подрыва при определенном положении цели в луче антенны взрывателя. По устройству и принципам работы радиовзрыватели могут быть импульсными, доплеровскими и частотными.  Рис. 8. Структурная схема импульсного радиовзрывателя В импульсном взрывателе передатчик вырабатывает высокочастотные импульсы малой длительности, излучаемые антенной в направлении цели. Луч антенны согласован в пространстве с областью разлета осколков боевой части. При нахождении цели в луче отраженные сигналы принимаются антенной, проходят приемное устройство и поступают на каскад совпадений, куда подается строб-импульс. При их совпадении выдается сигнал подрыва детонатора боевой части. Длительность строб-импульсов обуславливает диапазон возможных дальностей срабатывания взрывателя. Доплеровские взрыватели чаще работают в режиме непрерывного излучения. Сигналы, отраженные от цели и принятые антенной, поступают на смеситель, где выделяется частота Доплера. При заданных значениях скорости сигналы частоты Доплера проходят через фильтр и подаются на усилитель. При определенной амплитуде колебаний тока этой частоты выдается сигнал подрыва. Контактные взрыватели могут быть электрическими и ударными. Они находят применение в ракетах малой дальности при высокой точности стрельбы, что обеспечивает подрыв боевой части при прямом попадании ракеты. Для повышения вероятности поражения цели осколками боевой части принимаются меры по согласованию областей срабатывания взрывателя и разлета осколков. При хорошем согласовании область разлета осколков, как правило, совпадает в пространстве с областью нахождения цели. |
|
||
|
Главная | В избранное | Наш E-MAIL | Добавить материал | Нашёл ошибку | Наверх |
||||
|
|
||||